|
TRANSLATE THIS ARTICLE
Integral World: Exploring Theories of Everything
An independent forum for a critical discussion of the integral philosophy of Ken Wilber
SEE MORE ESSAYS WRITTEN BY FRANK VISSER
Eros and Bacteria
Why Some Organisms Grow in Complexity,
and Some Don't
Frank Visser
"The drive towards greater complexity came from within, not from on high."
— Nick Lane
In "The Spirit of Evolution Reconsidered", an award winning paper presented at the second Integral Theory Conference, I argued that Ken Wilber's view of (biological) evolution is flawed and suffers from a lack of engagement with the scientific literature.[1] Instead, Wilber presents a caricature of science, to further his theory of "The Spirit of Evolution", otherwise known as "Eros". In this view, evolution is seen, not as an accidental process leading nowhere in particular, but as an upward process of simple organisms or "holons" getting more and more complex, and more conscious in the process.
Never mind that this view is at variance with the full body of scientific writing about biological evolution. I used Richard Dawkins as spokesman of this science view, who has argued that Darwinism is NOT a theory of chance at all, but of random chance and non-random natural selection. I will not repeat these arguments here, but am still waiting for an integrally-informed response to this paper.
ON THE KEY EVOLUTIONARY ROLE OF MITOCHONDRIA
After completing the text of this paper, I discovered the works of acclaimed science writer and biochemist Nick Lane, who has recently published a highly readable book on evolution, Life Ascending: The Ten Great Inventions of Evolution[2]. Lane has argued that evolutionary theory is very well able to explain complex phenomena such as DNA, photosynthesis, the complex cell, sex, movement, sight, warm bloodedness, and even consciousness and death.

In an earlier book, ominously titled Power, Sex, Suicide: Mitochondria and the Meaning of Life[3]—more technical but even more interesting—Lane discussed many of the same topics, but focusing on the impact of mitochondria, the energy factories of the cell in most complex organisms, on the emergence of complex beings. Scientists now agree that these mitochondria originally where bacteria, who entered into a symbiotic relationship with single-celled primordial organisms. Though they can no longer live outside the cell, they show their quasi-independence by their ability to retain their own DNA and govern their own process of division (reminiscent of their bacterial past). It is because of these bacteria-turned-mitochondria that single-celled organisms could grow into giant beings such as sequoias and dinosaurs.
We are here thanks to half-digested parasites!
In the meantime, most other types of bacteria just stayed as they are: bacteria. Why haven't these other bacteria evolved into complex organisms? Lane's explanation of this peculiar difference is in a nutshell as follows: bacteria are single-celled organisms who breathe through their cell walls. Whenever bacteria grow in size, two factors give them a disadvantage in their chance of survival. One, to divide takes more time, so smaller bacteria will always outnumber the larger ones. And two, growing in size means that the ratio of surface area to content decreases, leading to inefficiency of breathing.

Because of this penalty on growing in size, bacteria have stayed small—and don't seem to be bothered by this at all. Multi-cellular beings don't live under this penalty: they have internalized their breathing process to the mitochondria in their individual cells, and increasing in size (both of the body and the number of genes) is no longer a liability. On the contrary, it offers opportunities to develop new modes of being, such as muscles, teeth and vision.
If Eros is responsible for the growth of complexity in organic beings, as Wilber suggests, why did it not affect the bacteria? Can integral philosophy explain this anomaly?
If one believes in a spiritual Force behind evolution, as is done by Ken Wilber, Teilhard de Chardin and other integral philosophers, the really interesting question is: why hasn't everything evolved? (And when one does not believe in such a Force, as science does out of principle, the question becomes: why has anything evolved at all? It seems to me that science is pretty much able to answer that question).
In Power, Sex, Suicide, Lane comments on the ancient idea of the Great Chain of Being, which has featured so prominently in Ken Wilber's earlier writings, and still lingers on in his "post-metaphysical" phase as the "immanent" force of Eros that supposedly drives evolution. Lane gives a fully naturalistic eplanation, even if, in his last sentence, he uses language reminiscent of Wilber ("What the premodern sages took to be meta-physical realities are in many cases intra-physical realities."[4]):
The question we'll look into now is the 'seeding' of complexity in eukaryotes: what exactly is it about the eukaryotic cell that seems to encourage the evolution of complexity? However misleading the impression may be, surveying the grand canvas of evolution after the appearance of the eukariotic cell does engender a sense of purpose. The idea of a great chain of being, striving to approach closer to God, is not accidental, even if it is wrong. [...] we'll see that the seeds of complexity were sown by mitochondria, for once mitochondria existed, life was almost bound to become more compliex. The drive towards greater complexity came from within, not from on high.[5]
BACTERIA AND US: BIOLOGICAL CLASSIFICATIONS
Some years ago, I was alerted to the importance of bacteria in evolution by attending a lecture on evolution given by Lynn Margulis, during a visit to Amsterdam, within the context of a series of critical approaches to Darwin. Throughout her long career, she has argued that plants, animals, and fungi—the three main kingdoms of complex organisms recognized by taxonomy—evolved not from one single organism, but by a process of repeated "symbiogenesis", resulting in plants having chlorophyl and animals having mitochondria. Like mitochondria, chlorophyl in plants shows a remarkable similarity to primordial bacteria, who could turn light into chemical energy.
Her views, presented in the seventies, and building on work done by Russian researchers from the twenties, were rejected by the scientific community at first, but have now reached the status of accepted fact. This widened my view of evolution tremendously, from the 500 million years covered by Darwinian theory, to the 3,5 billion years covered by this model.
It also demonstrated to me that evolution, during it's long, long phase of gestation, is not a simple process of transcend-and-include, but a messy process of "horizontal" gene exchange and symbiosis, resulting in the complex beings we tend to focus on. The Tree of Life, with it's neat branches and subbranches, turned out to have an entangled system of roots.
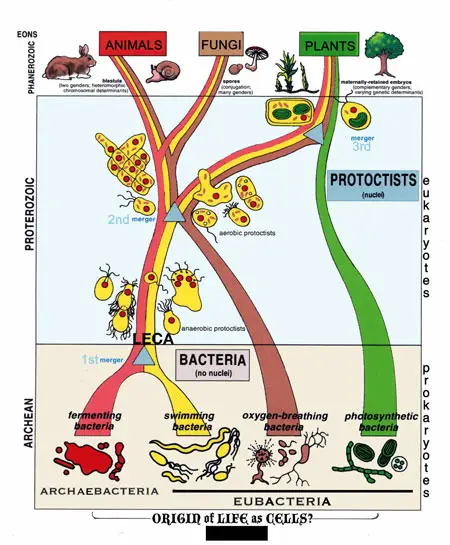
Margulis has co-edited the massive textbook Kingdoms and Domains[6], formerly titled Five Kingdoms, listing every major phylum of the natural world following a well-known five-fold classification, which has been held true for decades:
- Plants
- Animals
- Fungi
- Protoctists (several primitive organisms)
- Prokaryota (Archaea and Eubacteria)
Here's a graphical presentation:
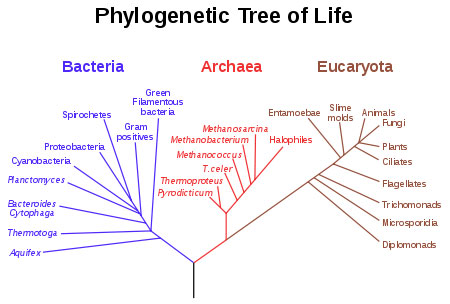
Incidentally, the major competing model, developed by Carl Woese, presents a threefold scheme, listing only these three large "domains":
- Eubacteria
- Archaebacteria (a domain discovered by Woese)
- Eukaryota (Plants, Animals, Fungi)
Again, graphically:
If Margulis' view was unorthodox for a long time, struggling for recognition by mainstream science, eventually to be embraced as scientific dogma to be challenged again, Woese's proposal encountered even more resistance (also from Margulis herself!), but seems to have won the day (but check out the magnificent Tree of Life website for current views on the complex roots of the Tree of Life, and the Wikipedia article on "Biological Classification" for a comparative approach).
Interestingly, the domain of the Archaebacteria, also known as "extremophiles" for their fondness of living in extreme high-temperature environments, has been single-handedly "discovered" by Woese—or actually re-classified—who had been using his proprietary method of rRNA sequencing, in 1997. Many consider these organisms to be the best candidates for being the "missing link"—and common ancestor—between the bacteria proper, who have never evolved to complexity, and the eukaryota, who did.
Though Nick Lane seems to side with Woese on this matter of taxonomy, Stephen Jay Gould, in his foreword to an earlier edition of Kingdoms and Domains, takes a more integral view, slightly favoring Margulis from a practical and educational point of view:
The system advocated here—five great kingdoms of life divided into two great domains [the Prokarya and the Eukarya]... might seem to be challenged by the discovery by Carl Woese and others that the genealogical tree of life has only three great branches, including two among the Prokarya (the Archaea and the Eubacteria), with all Eukarya on a third branch, and the three great multicellular kingdoms of plants, animals and fungi as twigs at the tips of this branch.
But classification must consider more than the timing of branching. Woese's surprising discovery makes excellent sense when we realize that life is at least 3,5 billion years old on Earth, and that only the Prokarya lived during the first 2 billion years or so. Since Eukarya arose so much later, they are confined to a single branch on a system that records time of branching alone.
Classification must also record degree and amount of diversity and complexity ... as well as the timing of branch points. When these criteria are added, the breaking of the enormous eukaryote branch into four kingdoms, and the compression of the two prokaryote branches into one kingdom of Bacteria seems fully justified, if only for our legitimately parochial interest in the astonishing diversity of organisms in our visible range of size and complexity. [7]
Integral Biology in action!
With all our focus on complexity, it is good to realize that, at least according to Stephen Jay Gould, we are still living "in the Age of Bacteria":
Bacteria really are the dominant form of life on Earth—and always have been and probably always will be. They are more abundant, more indestructible, more diverse in biochemistry (if not in complexity and outward form), and inhabit a greater range of environments than all the other four kingdoms combined.
But we cannot grasp this fundamental fact, and so much else about evolution, until we abandon our biased view of life as a linear chain leading to human complexity at a pinnacle, and focus instead upon the rich range of diversity itself as the primary phenomenon of life's spread and meaning.[8]
NOTES
[1] Ken Wilber, true to his usual unreceptive stance towards criticism, stated in a recent interview "The State of Integral with Ken Wilber", published in the Integral Leadership Review, regarding the criticism expressed at the IT conference: "I incidentally don't find any of the major criticisms valid; those that I do find valid have already been incorporated into my work, and I continue to do that." Assuming he has read my paper, a telling comment.
[2] Nick Lane, Life Ascending: The Ten Great Inventions of Evolution, Profile Books, 2009.
[3] Nick Lane, Power, Sex, Suicide: Mitochondria and the Meaning of Life, Oxford University Press, 2005.
[4] Ken Wilber, 'Excerpt G: Toward A Comprehensive Theory of Subtle Energies', Part I. Introduction: From the Great Chain of Being to Postmodernism in Three Easy Steps, wilber.shambhala.com.
[5] Power, Sex, Suicide, p. 107.
[6] Lynn Margulis & Michael J. Chapman, Kingdoms and Domains: An Illustrated Guide to the Phyla of Life on Earth, Elsevier/Academic Press, 2010. Foreword by Edward O. Wilson.
[7] Stephen Jay Gould, Foreword to: Margulis & Chapman, Kingdom and Domains, p. xiv-xv.
[8] Stephen Jay Gould, Foreword to: Margulis & Chapman, Kingdom and Domains, p. xv.
|

 Frank Visser, graduated as a psychologist of culture and religion, founded IntegralWorld in 1997. He worked as production manager for various publishing houses and as service manager for various internet companies and lives in Amsterdam. Books: Ken Wilber: Thought as Passion (SUNY, 2003), and The Corona Conspiracy: Combatting Disinformation about the Coronavirus (Kindle, 2020).
Frank Visser, graduated as a psychologist of culture and religion, founded IntegralWorld in 1997. He worked as production manager for various publishing houses and as service manager for various internet companies and lives in Amsterdam. Books: Ken Wilber: Thought as Passion (SUNY, 2003), and The Corona Conspiracy: Combatting Disinformation about the Coronavirus (Kindle, 2020).